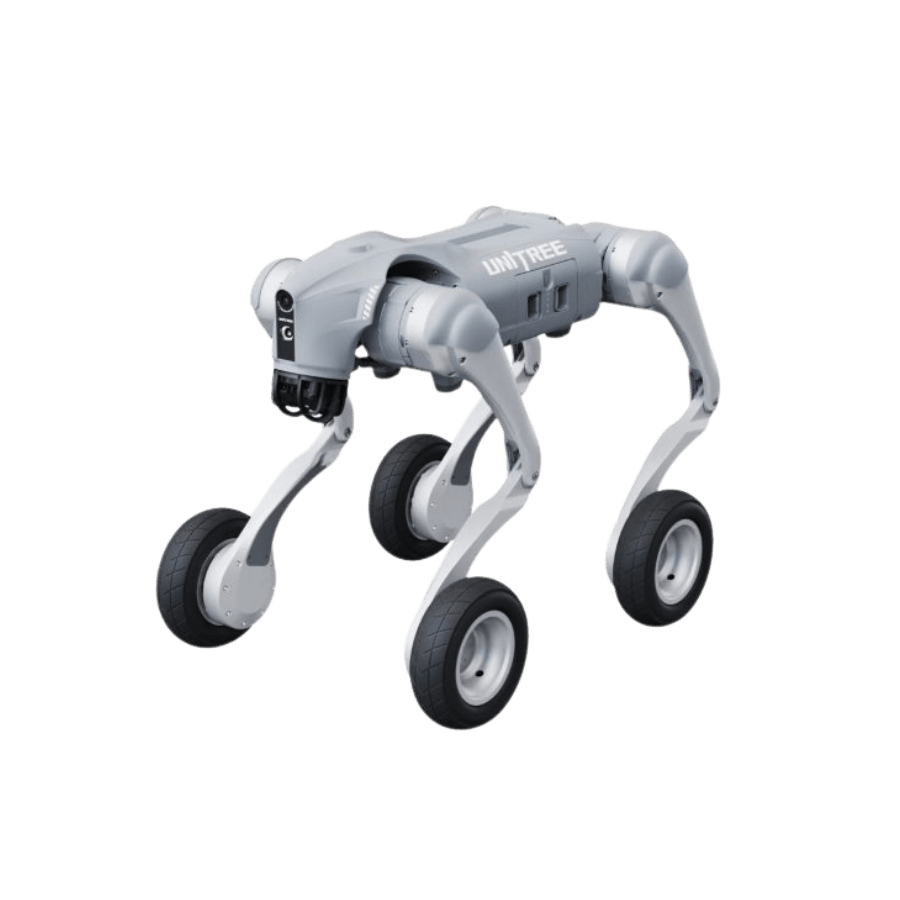
Der Unitree Go2W ist ein Roboterhund mit Rädern, der die Vorteile eines vierbeinigen Roboters mit effizientem Fahrbetrieb kombiniert. Dadurch entsteht eine hybride Mobilitätsplattform, die auf ebenen Flächen schnell und energiesparend rollt und zugleich in anspruchsvolleren Situationen stabil bleibt. Für Unternehmen und Forschungsteams ist der Go2W besonders interessant, wenn autonome Navigation, Inspektion oder Sicherheitsrouten in realen Umgebungen zuverlässig funktionieren sollen – etwa in Industriehallen, auf Betriebsgeländen, in großen Innenbereichen oder in gemischten Indoor-Outdoor-Szenarien.
Als „Go2-W“ positioniert sich das System zwischen klassischem Quadruped und mobilem Fahrroboter: Es ist kompakt, agil und auf autonome Bewegungslogik ausgelegt. Damit passt der Go2W zu Suchintentionen wie Roboterhund Industrie, Roboterhund Inspektion, autonomer Roboterhund, Unitree Go2W, Roboterhund mit Rädern oder Hybrid-Roboterhund.
Der Praxisvorteil: Rollen, Klettern und Hindernisse überwinden
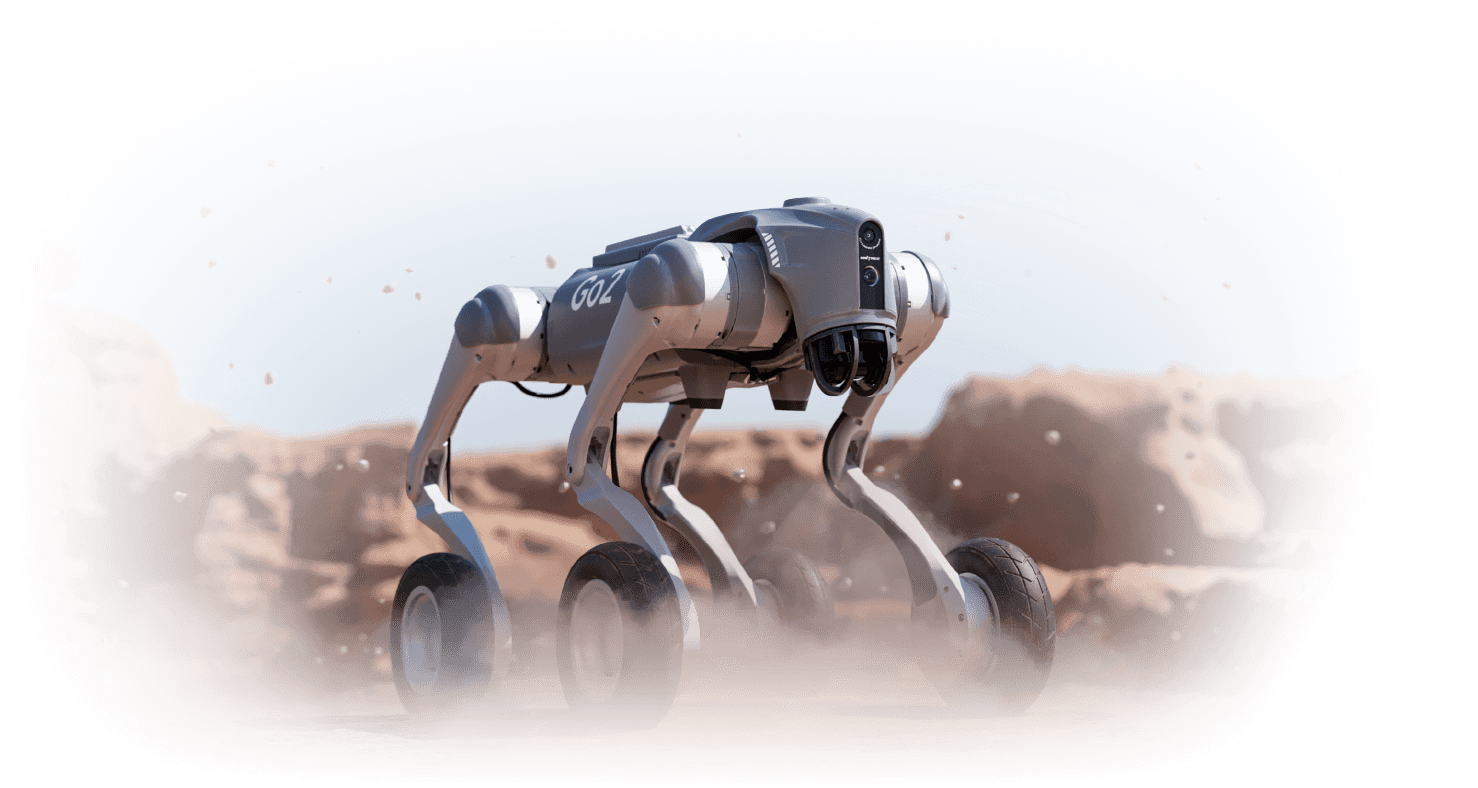
Ein zentraler Mehrwert eines Roboterhunds mit Rad-Bein-Ansatz ist die Kombination aus Reichweite und Geländegängigkeit. Auf glatten oder halbwegs ebenen Strecken kann das Rollprinzip Effizienz und Stabilität verbessern, während das Beinlayout bei Übergängen, Kanten und unruhigen Bodenbereichen zusätzliche Kontrolle ermöglicht. Der Go2W ist dabei auf „All-Terrain“ ausgelegt und kann Hindernisse in einer Größenordnung bis etwa 70 cm überwinden sowie Steigungen bis rund 35° bewältigen.
Typische Einsatzfelder für einen Roboterhund mit Rädern
- Inspektion und Rundgänge in Industrie & Logistik (z. B. Hallen, Anlagen, große Flächen)
- Sicherheits- und Patrouillenaufgaben (Routen, Checkpoints, Begleitung)
- Forschung und Entwicklung (Mobile Autonomie, Perception, SLAM, KI-Steuerung)
- Tech-Demos und Showroom-Anwendungen (stabile Navigation, autonome Bewegungsabläufe)
Technische Eckdaten: Maße, Gewicht, Geschwindigkeit und Nutzlast
Für Planung und Realbetrieb zählen klare Spezifikationen. Der Unitree Go2W ist kompakt gebaut und dadurch gut transportierbar und in Testumgebungen schnell einsatzbereit:
- Abmessungen (stehend): ca. 70 × 43 × 50 cm
- Gewicht (mit Batterie): ca. 18 kg
- Geschwindigkeit: 0 bis ca. 2,5 m/s
- Nutzlast: ca. 3 kg
- Max. „Climb/Drop“-Höhe: bis ca. 70 cm
- Max. Steigwinkel: ca. 35°
- Bereifung: 7-Zoll Luftreifen
- Grundrechenleistung: 8-Core High-Performance CPU
- Maximales Drehmoment (größter Gelenkantrieb): ca. 45 N·m
Damit lässt sich der Go2W sauber für Suchbegriffe wie „Unitree Go2W Spezifikationen“, „Roboterhund 2,5 m/s“, „Roboterhund 18 kg“, „Roboterhund Nutzlast“, „Roboterhund 45 Nm“ oder „Roboterhund Steigfähigkeit“ positionieren.
Wahrnehmung und autonome Navigation: LiDAR, Kamera, Hindernisvermeidung und SLAM
Im autonomen Betrieb ist Perception der entscheidende Faktor. Der Go2W setzt auf LiDAR-basierte Umgebungserfassung und Kamerasensorik, um Hindernisse zu erkennen und Bewegungen dynamisch anzupassen. Auf Produktseite wird zudem eine KI-gestützte Bewegungssteuerung beschrieben, die in Echtzeit auf Hindernisse und Geländeänderungen reagiert.
Ein wichtiger Baustein für professionelle Anwendungen ist SLAM (Simultaneous Localization and Mapping). Dadurch kann der Roboter digitale Karten erstellen, Position und Umgebung fortlaufend aktualisieren und Routenführung autonom optimieren.
Relevante Anwendungsszenarien für SLAM und Mapping
- autonome Inspektionsrouten mit stabiler Wiederholbarkeit
- Navigation in wechselnden Layouts (z. B. Lager, Ausstellungsflächen, Werkstätten)
- Tests zu Sensorfusion, Lokalisierung und Hindernislogik
- Datenaufzeichnung für KI-Training und Evaluierung (Embodied AI / Mobile Autonomie)
Steuerung, App-Funktionen und OTA-Updates: im Betrieb schnell anpassbar
Für den täglichen Einsatz sind Bedienbarkeit und Wartbarkeit entscheidend. Der Go2W unterstützt App-Betrieb und OTA-Updates, sodass Funktionen und Verbesserungen softwareseitig aktualisiert werden können.
Zusätzlich werden manuelle Steuerung, Frontlicht sowie Konnektivität über Wi-Fi 6, 4G und Bluetooth genannt – relevant für Remote-Betrieb, große Flächen und flexible Setups.
Für Interaktion werden u. a. Voice-Funktionen sowie KI/Sprach-Interaktion über die App aufgeführt, was den Go2W für Showroom- und Assistenzszenarien zusätzlich interessant macht.
Entwicklungsplattform: SDK, API, ROS und zusätzliche Rechenleistung für KI-Projekte
Neben dem professionellen Einsatz ist der Go2W auch als offene Plattform für Robotik-Forschung und sekundäre Entwicklung positioniert. Es werden frei zugängliche SDKs, API-Schnittstellen und ROS-Integration beschrieben, um eigene Algorithmen, Sensorik-Module und Bewegungsmuster zu implementieren.
Je nach Ausführung ist zusätzliche Rechenleistung über ein Jetson-Orin-NX-Modul (100 TOPS) vorgesehen, was insbesondere für KI-Inferenz, Sensorfusion und komplexere Autonomie-Pipelines relevant ist.
Damit passt der Go2W zu Suchbegriffen wie „ROS Roboterhund“, „Roboterhund SDK“, „Robotik API“, „Jetson Orin NX Robotik“, „100 TOPS Robotik“ oder „KI-Roboterhund Entwicklungsplattform“.
Akku, Laufzeit und Laden: planbar für Testtage und mobile Einsätze
Im Betrieb spielt Energieplanung eine große Rolle – besonders bei Inspektionsläufen und längeren Testreihen. Für den Go2-W wird eine Long-Endurance-Batterie (15.000 mAh) genannt, mit einer typischen Laufzeit von ca. 1,5 bis 3 Stunden sowie Fast-Charge (33,6 V / 9 A).
Damit lässt sich der Go2W gut in Praxisabläufe integrieren: kurze Ladefenster, mehrere Testblöcke pro Tag und klare Einsatzzeiten für wiederholbare Experimente.