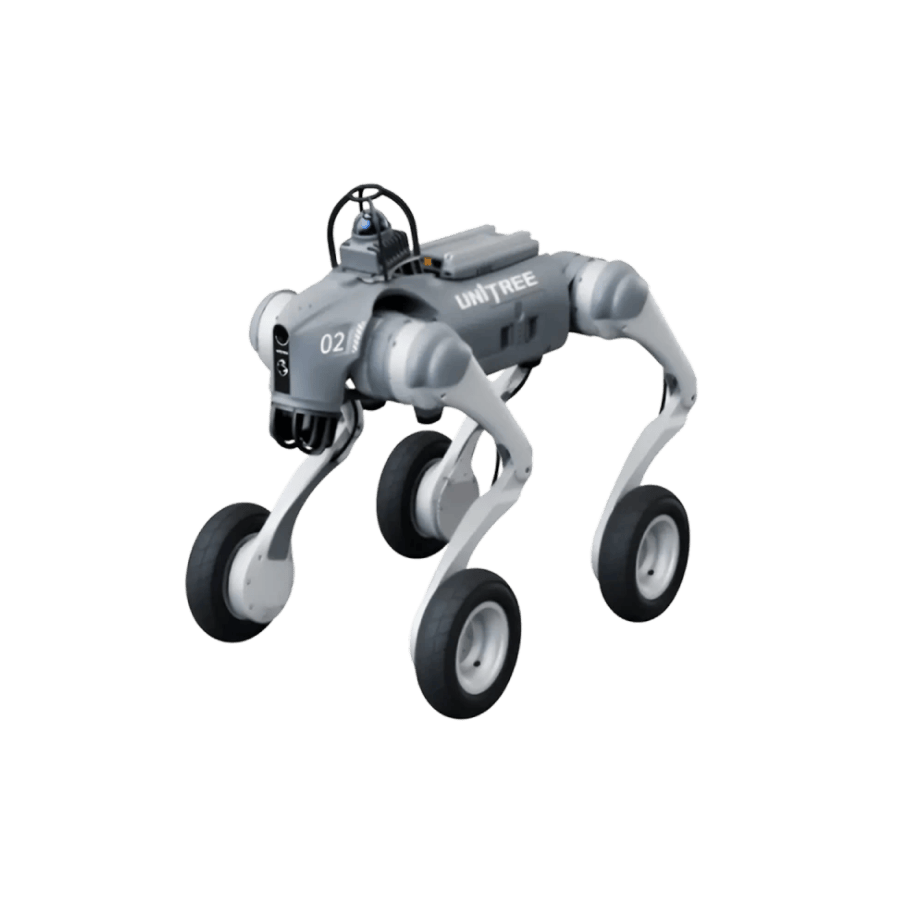
Der Unitree Go2W EDU ist ein Roboterhund mit Rädern, der die Vorteile eines vierbeinigen Roboters (Quadruped) mit effizienter Roll-Mobilität kombiniert. Dadurch entsteht eine Hybrid-Plattform, die auf ebenen Strecken schnell und energieeffizient fährt und gleichzeitig bei Übergängen, Kanten und wechselnden Bodenbedingungen stabil bleibt. Für Hochschulen, Labore und Entwicklerteams ist der Go2W EDU besonders interessant, wenn autonome Robotik nicht nur demonstriert, sondern als reproduzierbares Entwicklungsprojekt umgesetzt werden soll – inklusive Datenerfassung, Sensorfusion, Navigation, Mapping und KI-gestützter Bewegungslogik.
Im Vergleich zu klassischen Roboterhunden zielt die Go2W EDU-Reihe stärker auf offene Entwicklung: eigene Algorithmen testen, Sensorik-Setups erweitern, ROS-Workflows integrieren und Experimente iterativ verbessern. Wer einen Roboterhund für Forschung, Lehre oder Prototyping sucht, bekommt hier eine Plattform, die sowohl im Indoor-Labor als auch in praxisnahen Umgebungen funktioniert – vom Showroom bis zum Industrieareal.
Hybrid-Mobilität in der Praxis: Rollen auf Strecke, Kontrolle am Hindernis
Ein Roboterhund mit Rad-Bein-Konzept ist besonders dann sinnvoll, wenn Strecken effizient zurückgelegt werden müssen, aber die Umgebung nicht perfekt „fahrroboterfreundlich“ ist. Auf glatten Böden, langen Gängen oder Hallenflächen kann der Go2W EDU stabil rollen, während das Beinlayout bei Übergängen und schwierigen Passagen zusätzliche Bewegungsfreiheit schafft. Dadurch eignet sich der Go2W EDU für gemischte Szenarien: Indoor-Outdoorkanten, Bordsteine, Rampen, ungleichmäßige Böden oder wechselnde Untergründe wie Asphalt, Beton und Pflaster.
Effizienz und Sicherheit in realen Einsatzprofilen
Für Inspektionsrouten und Sicherheitsanwendungen zählen konstante Fahrprofile, präzise Hinderniserkennung und zuverlässige Reaktion. In der Praxis bedeutet das: weniger „Stop-and-go“, weniger manuelle Korrekturen und stabilere Bewegungsabläufe. Gerade in großen Flächen – Lager, Werkstatt, Messehalle, Campus – ist die Kombination aus rollender Mobilität und alltagstauglicher Hindernislogik ein echter Vorteil für mobile Robotik, weil sie Reichweite und Robustheit in einem System vereint.
Typische Anwendungsfelder für den Go2W EDU
- Inspektion und Monitoring: wiederkehrende Rundgänge, Anlagenchecks, Zustandskontrolle
- Forschung & Entwicklung: autonome Navigation, SLAM, Sensorfusion, Embodied AI, Sim-to-Real
- Sicherheitsrouten und Patrouille: definierte Checkpoints, autonome Strecken, Begleitfunktionen
- Lehre und Ausbildung: Robotik-Projekte, Programmierkurse, ROS-Integration, KI-Experimentreihen
Damit deckt der Go2W EDU Suchintentionen wie „Roboterhund mit Rädern“, „Unitree Go2W EDU“, „Quadruped für Forschung“, „autonome Robotik Plattform“, „Roboterhund Inspektion“ oder „Security Roboterhund“ organisch ab.
Wahrnehmung & Autonomie: LiDAR-Umgebungserfassung, Tiefenkamera und SLAM
Für autonome Robotik ist Perception entscheidend. Der Unitree Go2W EDU ist auf präzise Umgebungserkennung ausgelegt und kombiniert LiDAR-basierte Erfassung mit zusätzlicher Kamerasensorik. Das Ziel: Hindernisse früh erkennen, sichere Trajektorien planen und in Echtzeit auf Veränderungen reagieren. Besonders relevant ist das in dynamischen Umgebungen, in denen Personen, Objekte oder Fahrwege variieren.
SLAM und Mapping für reproduzierbare Routen
Ein praktischer Vorteil für Forschung und Industrie ist SLAM (Simultaneous Localization and Mapping): Der Roboter kann Karten erstellen, Positionen kontinuierlich aktualisieren und Routenführung stabil halten. Für Labor und Pilotbetrieb bedeutet das: wiederholbare Fahrten, vergleichbare Messergebnisse und saubere Evaluierung Ihrer Algorithmen. Typische Entwicklungsaufgaben – Wegpunkte, Zonenlogik, Hindernisvermeidung, Routenoptimierung – lassen sich damit in kontrollierbaren Szenarien abbilden und schrittweise erweitern.
Datengrundlage für Sensorfusion und KI-Modelle
Wer KI-Robotik ernsthaft entwickelt, braucht Daten, die nicht nur „in der Simulation“ existieren. Mit LiDAR- und Kameradaten können Sie reale Datensätze erzeugen, Modelle validieren und Robustheit unter echten Bedingungen testen: andere Lichtverhältnisse, neue Hindernisse, unterschiedliche Untergründe oder wechselnde Umgebungsstrukturen. Genau hier liefert der Go2W EDU den Mehrwert einer mobilen Entwicklungsplattform – weil autonome Navigation, Hindernislogik und Bewegungssteuerung als Gesamtsystem betrachtet werden können.
EDU-Versionen: Plus, Plus-Mid und Plus-XT für unterschiedliche Forschungsanforderungen
Die Go2W EDU-Reihe wird typischerweise in mehreren Ausprägungen angeboten, um unterschiedliche Anforderungen an Sensorik und Rechenleistung abzudecken. Im Kern bleibt die Plattform identisch, während die EDU-Varianten zusätzliche Möglichkeiten für anspruchsvolle Robotik-Projekte bieten.
Mehr Rechenleistung für KI und Autonomie
Für anspruchsvolle Pipelines – etwa lokale Inferenz, Sensorfusion, semantische Karten oder komplexe Entscheidungslogik – ist zusätzliche Rechenleistung entscheidend. Die EDU-Varianten sind auf genau diese Anforderungen ausgelegt und ermöglichen ein Setup, das nicht sofort von externer Infrastruktur abhängig ist. Das ist besonders relevant für Forschung zu Mobile Autonomy, KI-gestützter Navigation und Echtzeit-Perception.
LiDAR-Optionen für höhere Detailtiefe
Je nach Variante werden unterschiedliche LiDAR-Konfigurationen eingesetzt, um Reichweite, Detailtiefe und Objekterkennung zu erhöhen. Dadurch können Projekte skaliert werden: vom Einstieg in SLAM und Navigation bis zu fortgeschrittener Forschung mit höherer Sensorauflösung und robusteren Umgebungsmodellen. Für Suchbegriffe wie „LiDAR Roboterhund“, „3D Umgebungserfassung“, „Mapping Roboter“ und „SLAM Roboterhund“ ist dieser Aspekt oft kaufentscheidend.
Entwicklungsplattform: SDK, API, ROS und eigene Bewegungslogik
Der wichtigste EDU-Vorteil ist die Offenheit für Entwicklung. Der Unitree Go2W EDU richtet sich an Teams, die eigene Software-Stacks und Algorithmen einsetzen möchten – von einfachen Steuerprogrammen bis zu umfangreichen Robotik-Architekturen. Über SDK- und API-Schnittstellen können Sie Bewegungsmuster, Sensor-Module und Verhaltenslogik implementieren. In typischen Entwicklungsprojekten bedeutet das: klare Zustandsmodelle, Logging, Testszenarien und iterative Optimierung statt einmaliger Vorführungen.
ROS-Integration für Lehre und Forschung
ROS ist in Forschung und Ausbildung ein zentraler Standard, weil es modulare Entwicklung, wiederverwendbare Komponenten und saubere Systemarchitektur ermöglicht. Mit einer ROS-nahen Integration kann der Go2W EDU in bestehende Workflows eingebunden werden: Navigation-Stacks, Mapping-Module, Datenaufzeichnung, Teleoperation und Experimente mit KI-Policies. Für Lehrbetrieb und studentische Projekte ist das besonders hilfreich, weil Teams parallel an Wahrnehmung, Planung und Steuerung arbeiten können, ohne dass die Plattform zur Sackgasse wird.
Erweiterbarkeit für anspruchsvolle KI-Projekte
Wenn Projekte wachsen, steigen Anforderungen an Rechenleistung, Streaming, Remote-Betrieb oder zusätzliche Sensorik. Der Go2W EDU ist auf modulare Erweiterbarkeit ausgelegt, sodass sich das System an komplexere Forschungsvorhaben anpassen lässt. Dadurch bleibt die Plattform langfristig nutzbar – für Prototyping, KI-Training, Simulationsumgebungen und die Validierung realer Autonomie-Workflows.
Eckdaten für die Praxis: kompakt, mobil, softwareseitig aktuell
Für Einsatzplanung zählen einfache Eckwerte: Transport, Geschwindigkeit, Nutzlast, Laufzeit und Wartbarkeit. Als rollende Hybrid-Plattform ist der Go2W für stabile Fahrprofile auf ebenen Flächen ausgelegt und unterstützt gleichzeitig alltagstaugliche Hindernisszenarien. Typisch sind außerdem App-Bedienung, OTA-Updates sowie moderne Konnektivität (z. B. Wi-Fi, Mobilfunk-Optionen und Bluetooth), damit der Roboterhund im Betrieb flexibel steuerbar bleibt und Softwareverbesserungen kontinuierlich eingespielt werden können.
Gerade in Lehre und Forschung ist das wichtig: Ein Roboterhund soll nicht nur „einmal funktionieren“, sondern dauerhaft betreibbar sein, damit Projekte über Wochen und Semester hinweg stabil laufen. Der Go2W EDU unterstützt genau diese Logik: eine robuste Mobilitätsbasis, kombinierbar mit Autonomie- und Entwicklungsfunktionen, die Ihre KI- und Robotikprojekte messbar voranbringen.