Der Unitree G1 Basic ist ein humanoider Roboter für Teams, die humanoide Robotik praktisch testen, Daten sammeln und Software in der realen Welt validieren möchten. Als kompakte, agile Plattform eignet sich der G1 Basic besonders für Robotik-Forschung, KI-Entwicklung und technische Ausbildung, weil er Bewegung, Wahrnehmung und Manipulation in einem System vereint. Wer einen humanoiden Roboter kaufen möchte, um Embodied AI, Sensorfusion oder autonome Navigation an einem echten System zu erproben, erhält mit dem Unitree G1 Basic eine praxistaugliche Basis für reproduzierbare Experimente.
Im Gegensatz zu reinen Demonstrationssystemen steht beim G1 Basic die Umsetzbarkeit im Laboralltag im Fokus: definierte Bewegungsabläufe, stabile Lauf- und Standphasen, sowie eine Sensorik, die Umgebungen zuverlässig abbildet. Dadurch lässt sich humanoide KI-Robotik nicht nur präsentieren, sondern systematisch entwickeln, messen und verbessern.
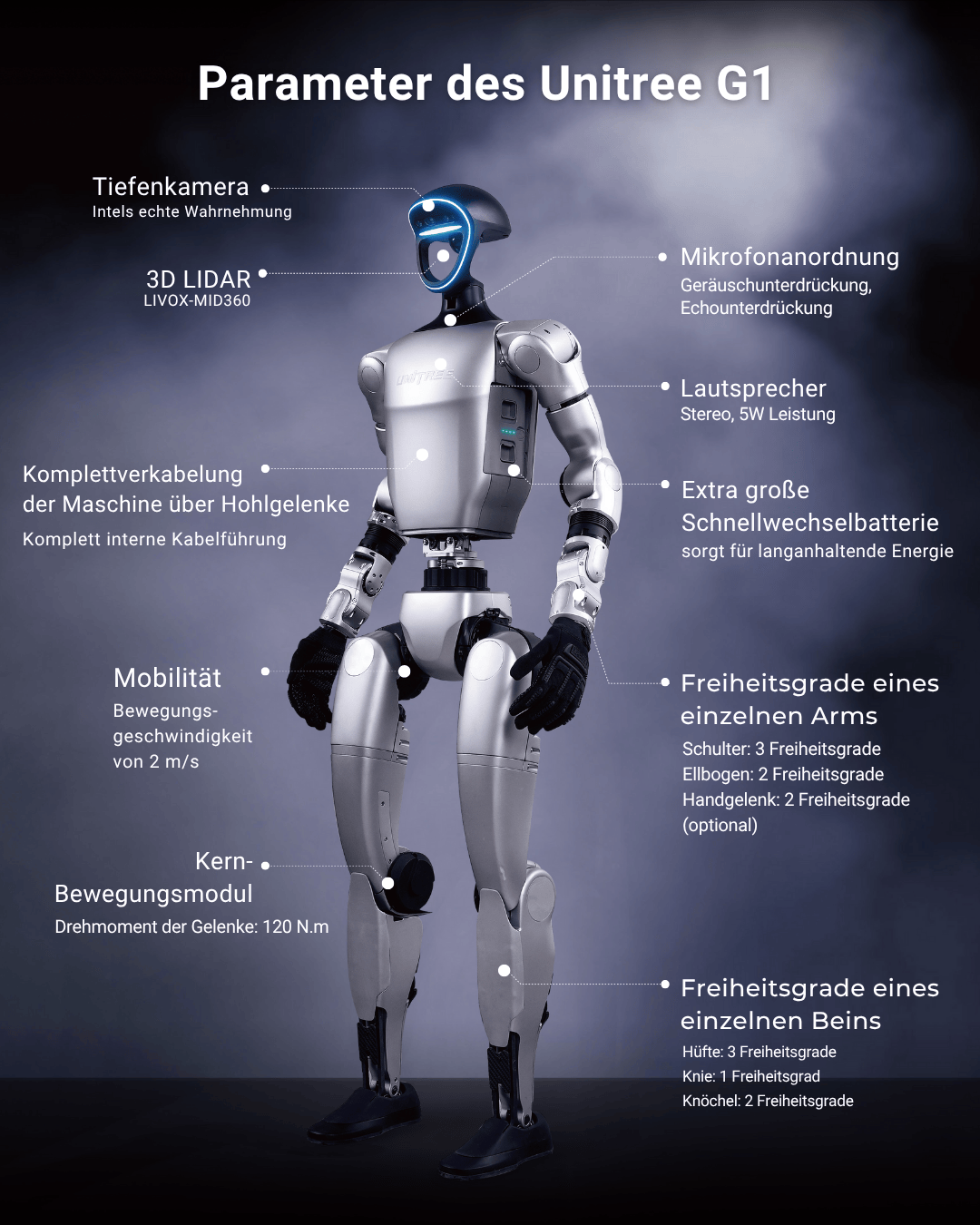
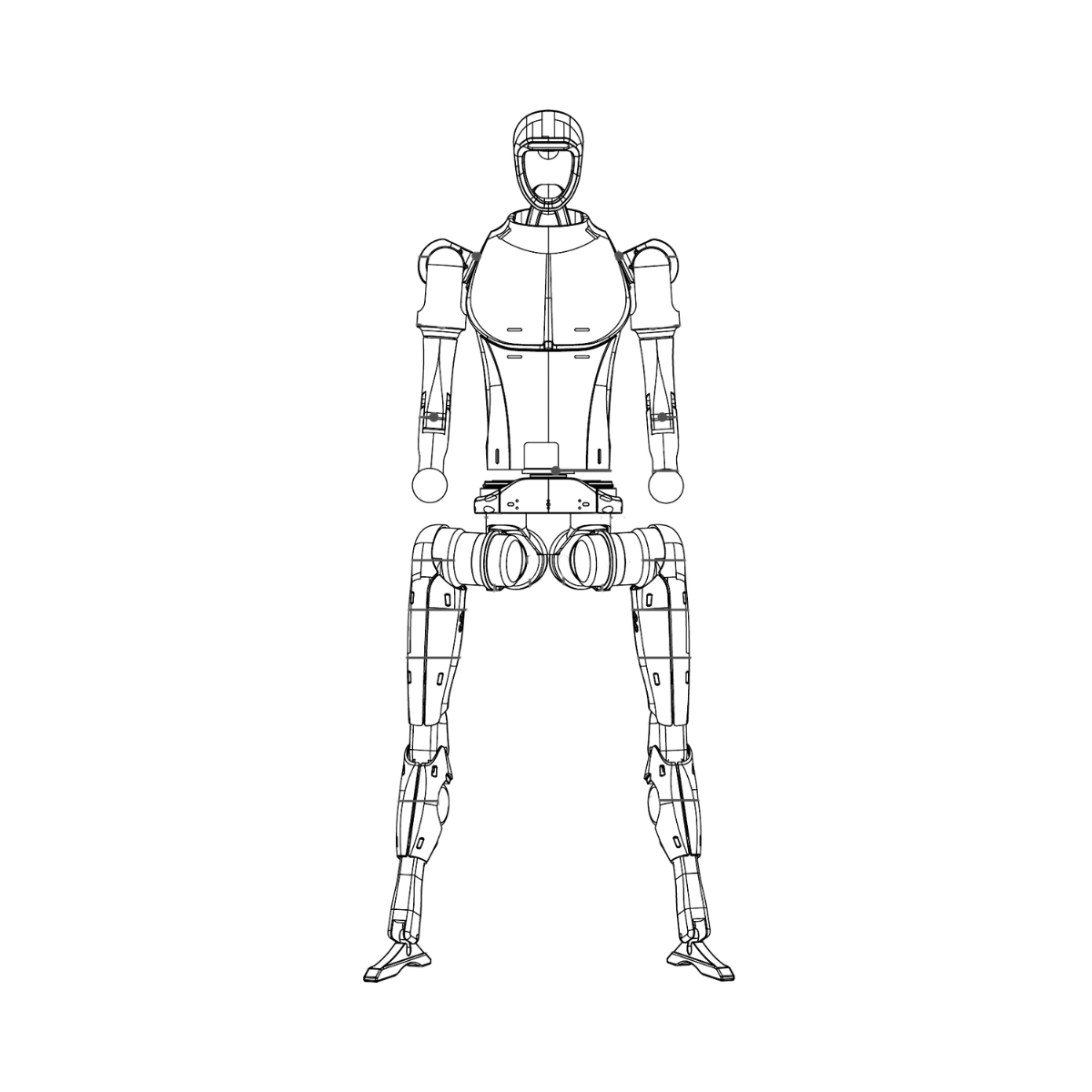
Technische Eckdaten: Maße, Sensorik und Leistungswerte im Überblick
Für Projektplanung, Einsatzszenarien und Vergleichbarkeit sind klare Spezifikationen entscheidend. Der Unitree G1 Basic bringt dafür kompakte Abmessungen und praxisnahe Leistungswerte mit:
- Abmessungen: 1270 × 480 × 380 mm
- Gewicht: ca. 35 kg
- Freiheitsgrade (DOF): 23
- Max. Laufgeschwindigkeit: 1,8 m/s
- Max. Sprung / Hüpfen: ca. 0,65 m
- Akku: ca. 2,4 kWh
- Laufzeit: ca. 2,5–3,5 Stunden (je nach Last)
- Ladezeit: ca. 1,5 Stunden
- Sensorik: 3D-LiDAR, Depth-Kamera, IMU
- Manipulation: zwei 3-Finger-Kraft-Position-Hände
- Rechenplattform: Onboard 8-Core CPU (erweiterbar)
- Schutzklasse: IP54 (Standard)
- Temperaturbereich: −10 °C bis +45 °C
Diese Eckdaten sind besonders relevant für Suchanfragen wie „humanoider Roboter Forschung“, „Unitree G1 Basic Spezifikation“, „23 DOF humanoider Roboter“ oder „3D-LiDAR humanoide Robotik“, weil sie direkt die technische Eignung für Labor, Ausbildung und Pilotumgebungen abbilden.
Präzise Bewegung mit KI-Kontrolle: Balance, Lokomotion und Dynamik
Ein zentraler Vorteil humanoider Robotik ist die Fähigkeit, in menschennahen Umgebungen zu agieren: Wege, Übergänge, kleine Hindernisse und variable Bodenbedingungen. Der Unitree G1 Basic setzt dafür auf eine KI-gestützte Bewegungssteuerung, die flüssige Abläufe und stabile Körperkontrolle ermöglicht. Die 23 Gelenkachsen sind so ausgelegt, dass Bewegungen nicht nur „funktionieren“, sondern wiederholbar sind – ein entscheidender Punkt für Robotiktests, Benchmarking und algorithmische Weiterentwicklung.
Stabilität und adaptive Balance für reale Testumgebungen
Bei Versuchen zu Gait-Design, Whole-Body-Control oder Störungsrobustheit kommt es darauf an, wie kontrolliert der Roboter auf Veränderungen reagiert. Der G1 Basic unterstützt adaptive Balance und automatische Schwerpunktanpassung, sodass sich auch Szenarien wie unebene Flächen, Richtungswechsel oder Stop-and-Go-Verhalten praxisnah untersuchen lassen. Das ist besonders wertvoll für Forschungsbereiche wie Reinforcement Learning, Imitation Learning oder modellprädiktive Regelung, bei denen kleine Parameteränderungen messbare Effekte haben sollen.
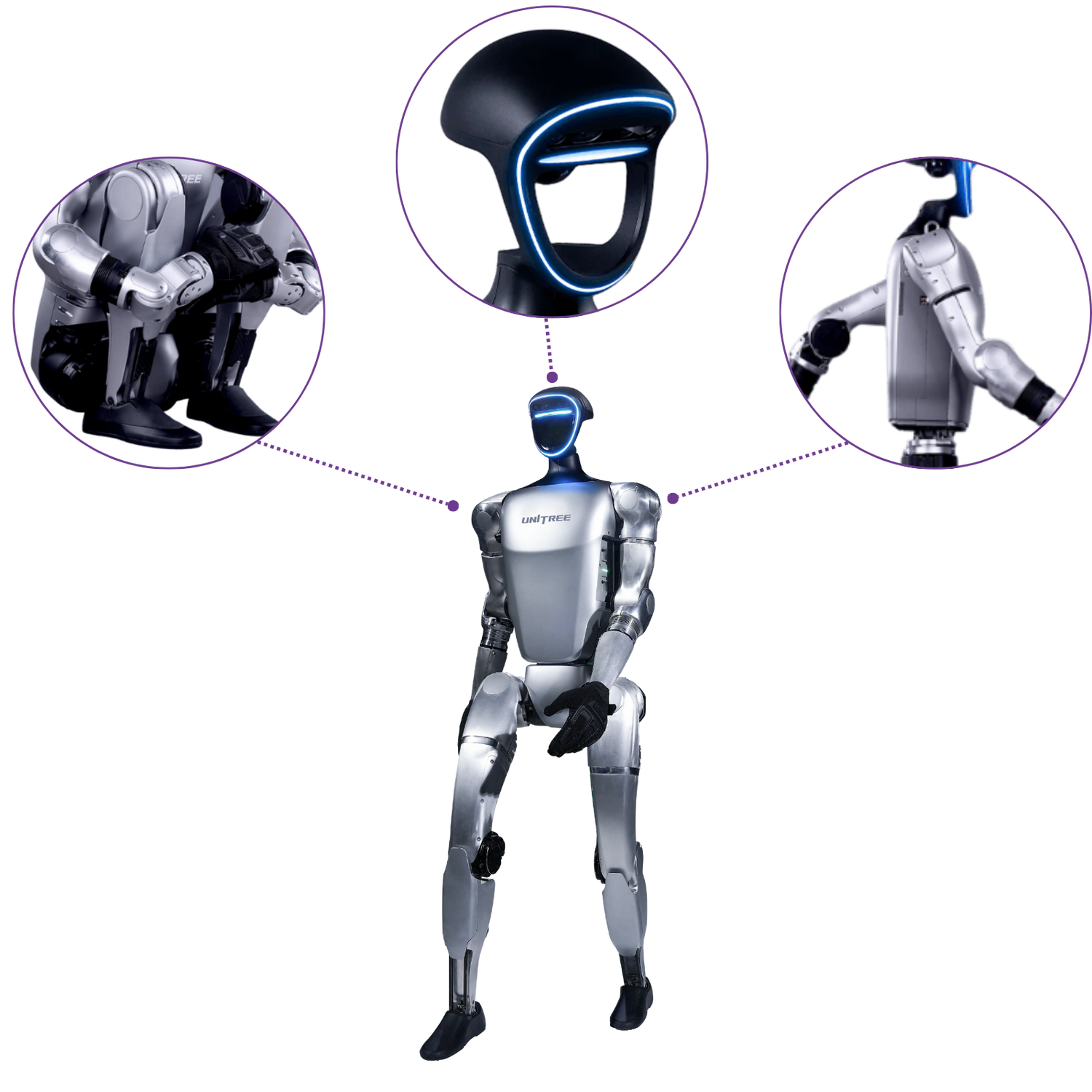
Wahrnehmung & Umgebungserfassung: 3D-LiDAR, Depth-Kamera und IMU
Moderne humanoide Robotik steht und fällt mit Perception. Der Unitree G1 Basic kombiniert 3D-LiDAR, eine Depth-Kamera und eine IMU, um Lage, Bewegung und Umgebung in Echtzeit zu erfassen. Dadurch eignen sich Projekte rund um autonome Navigation, Hindernisvermeidung, Mapping und robuste Lokalisierung besonders gut für diese Plattform.
Navigation, Mapping und Sensorfusion in der humanoiden Robotik
Für Forschung und Entwicklung sind nicht nur „Ergebnisse“, sondern Datenqualität und Auswertbarkeit entscheidend. Die Kombination aus Tiefeninformation, LiDAR-Geometrie und inertialer Messung unterstützt typische Sensorfusion-Workflows, etwa zur stabilen Zustandsabschätzung oder zur dynamischen Umweltkarte. Damit lässt sich humanoide Robotik im Labor realistisch testen – inklusive wechselnder Distanzen, bewegter Objekte und veränderlicher Licht- bzw. Sichtbedingungen.
Manipulation mit 3-Finger-Kraft-Position-Händen: Greifen, Positionieren, Interaktion
Für viele Use Cases ist der nächste Schritt nach Navigation die Manipulation. Der Unitree G1 Basic verfügt über zwei 3-Finger-Hände mit Kraft-Position-Ansatz. Das erlaubt Versuche, bei denen Greifen nicht nur „zu“ oder „auf“ ist, sondern kontrolliert in Kontakt geht: halten, umgreifen, ablegen oder leichtes Justieren von Objekten.
Mobile Manipulation und Greifplanung im Praxistest
In Forschungsszenarien wie Contact-Rich Manipulation, visuellem Servoing oder Greifplanung unter Unsicherheit ist die Fähigkeit, Greifpunkte zu variieren und die Bewegung des gesamten Körpers zu koordinieren, besonders wichtig. Der humanoide Roboter kann hierbei als Plattform dienen, um das Zusammenspiel aus Wahrnehmung, Trajektorienplanung und Hand-Körper-Koordination zu testen. Suchintentionen wie „humanoider Roboter greifen“, „3-Finger Roboterhand“, „Kraft-Position Regelung Roboter“ oder „mobile Manipulation humanoid“ werden dadurch thematisch sauber abgedeckt.
Offene Entwicklungsplattform: SDKs, Schnittstellen und erweiterbare Rechenleistung
Für viele Teams ist nicht nur die Hardware entscheidend, sondern die Entwicklungsfähigkeit: Wie schnell lassen sich eigene Programme integrieren? Wie gut passt das System in bestehende KI-Pipelines und Robotik-Workflows? Der Unitree G1 Basic ist als Entwicklungsplattform positioniert und unterstützt SDKs sowie offene Schnittstellen für eigene Steuerungslogik, Datenerfassung und Experimente. Die Onboard 8-Core CPU (erweiterbar) schafft zudem eine Basis für lokale Verarbeitung, prototypische Inferenz und stabile Steuerungsloops, ohne von Anfang an eine vollständig externe Infrastruktur vorauszusetzen.
Reproduzierbare Tests, Logging und iterative Optimierung
Wer humanoide Robotik entwickeln will, benötigt Iteration: Hypothese → Test → Messung → Verbesserung. Der G1 Basic eignet sich dafür, weil er sowohl für schnelle Demos als auch für strukturierte Testreihen genutzt werden kann – etwa mit wiederkehrenden Szenarien für Gangstabilität, Navigation oder Greifverhalten. Dadurch lässt sich organisch relevanter Content zu „Robotik Entwicklung“, „KI-Roboter Plattform“ und „humanoide Robotik Forschung“ abbilden, ohne auf vage Versprechen angewiesen zu sein.
Betrieb im Alltag: Akkulaufzeit, IP54 und Temperaturbereich
Für Labor- und Pilotbetrieb zählt Verfügbarkeit. Mit einer Laufzeit von ca. 2,5 bis 3,5 Stunden (abhängig von Last) und einer Ladezeit von ca. 1,5 Stunden lässt sich der Unitree G1 Basic in typischen Testtagen gut einplanen. Der IP54-Schutz (Standard) und der Temperaturbereich von −10 °C bis +45 °C unterstützen zusätzliche Einsatzszenarien, beispielsweise in Werkstätten, Hallen oder kontrollierten Outdoor-Bereichen. Für Suchanfragen wie „IP54 humanoider Roboter“, „Akkulaufzeit humanoide Robotik“ oder „Unitree G1 Laufzeit“ liefert dieser Abschnitt klare, verwertbare Informationen.