Der Unitree G1 EDU ist ein humanoider Roboter, der gezielt für Ausbildung, akademische Forschung und anwendungsnahe Entwicklung konzipiert ist. Im Mittelpunkt steht nicht nur die Demonstration menschenähnlicher Bewegungen, sondern die Möglichkeit, Algorithmen, Wahrnehmung und Steuerung reproduzierbar zu testen. Damit eignet sich der G1 EDU als Robotik-Entwicklungsplattform für Universitäten, Institute, Schulen, Innovationslabore und Teams, die Embodied AI, autonome Navigation oder Mensch-Roboter-Interaktion in realen Umgebungen validieren möchten.
Wer einen humanoiden Roboter kaufen möchte, um Robotiksoftware praxisnah aufzubauen, profitiert besonders von der EDU-Ausrichtung: Fokus auf offene Schnittstellen, ROS-Integration und ein Setup, das für Lehrpläne, Projektarbeiten und strukturierte Experimentreihen nutzbar ist. So wird aus humanoider Robotik ein messbares Lern- und Forschungsinstrument – statt eines reinen Show-Objekts.
Technische Spezifikationen, die für Planung und Projektarbeit zählen
Für Lehrbetrieb und Forschung ist wichtig, dass Dimensionen, Leistungswerte und Sensorik klar planbar sind. Der Unitree G1 EDU kombiniert kompakte Bauweise mit praxisrelevanter Ausstattung:
- Abmessungen: 1270 × 480 × 380 mm
- Gewicht: ca. 35 kg
- Freiheitsgrade (DOF): 23
- Max. Laufgeschwindigkeit: 1,8 m/s
- Max. Sprunghöhe: ca. 0,65 m
- Akku: 2,4 kWh
- Laufzeit: 2,5–3,5 Stunden (abhängig von Last und Betrieb)
- Ladezeit: ca. 1,5 Stunden
- Sensorik: 3D-LiDAR, Depth-Kamera, IMU
- Manipulation: zwei 3-Finger-Kraft-Position-Hände
- Rechenplattform: Onboard 8-Core-CPU (Option auf KI-Erweiterung, z. B. Jetson Orin NX)
- Schutz: IP54 (Standard)
- Temperaturbereich: −10 °C bis +45 °C
Diese Daten sind nicht nur „nice to have“, sondern direkt relevant für typische Suchanfragen wie „Unitree G1 EDU Spezifikation“, „humanoider Roboter 23 DOF“, „3D LiDAR humanoider Roboter“, „Depth Kamera Robotik“ oder „IP54 Robotik Plattform“.
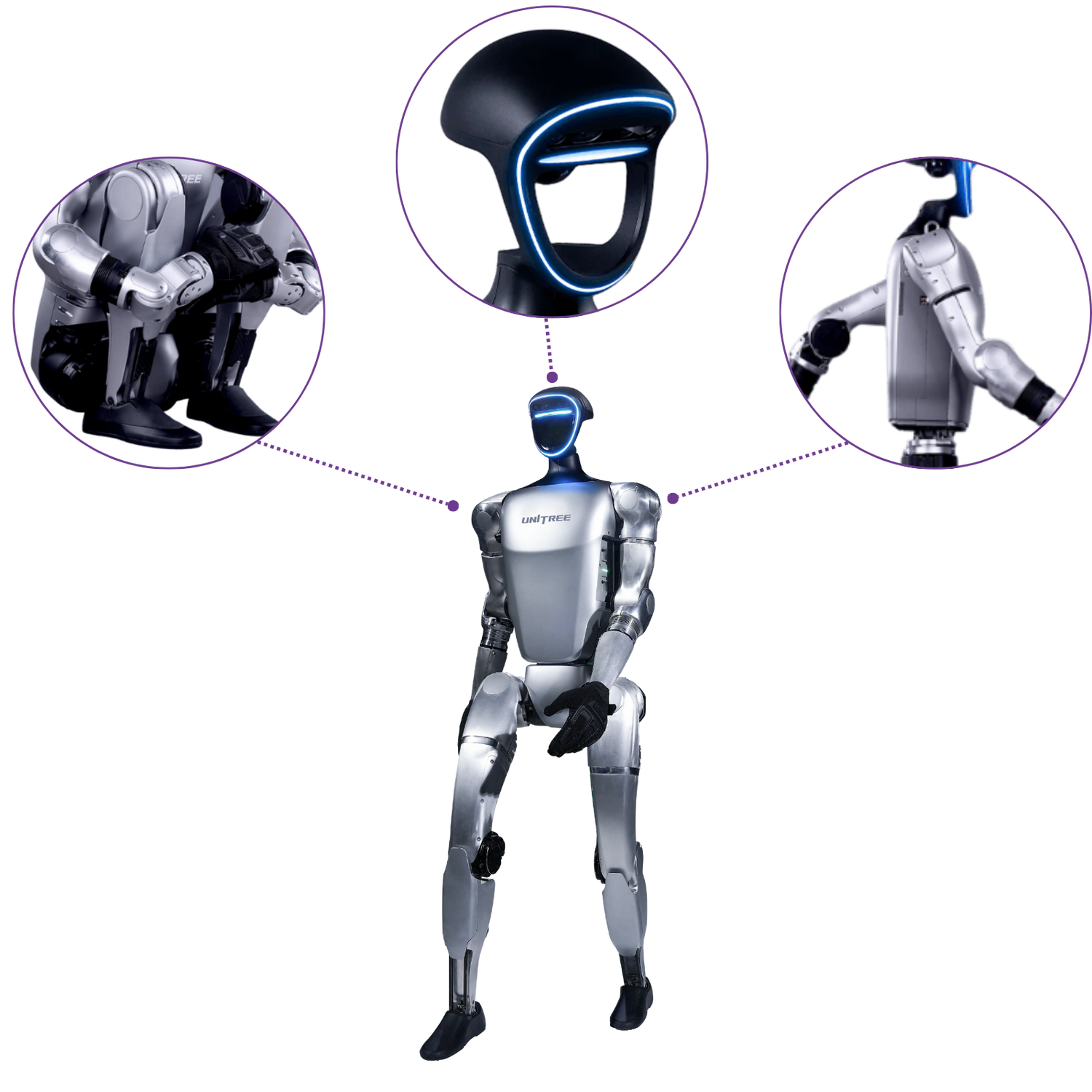
Bewegungsintelligenz in der Praxis: Lokomotion, Balance und Reaktionsverhalten
Humanoide Robotik ist besonders dort spannend, wo Umgebungen für Menschen gebaut sind: schmale Wege, unterschiedliche Bodenbeläge, Arbeitsflächen, wechselnde Hindernisse und dynamische Situationen. Der Unitree G1 EDU nutzt eine KI-basierte Bewegungssteuerung, um realistische, flüssige Bewegungsabläufe zu ermöglichen. Die 23 Gelenkachsen (DOF) sind dabei entscheidend, um Körperhaltung, Schrittfolge und Balance fein abzustimmen – ein wichtiger Faktor für Gait-Optimierung, Whole-Body-Control und belastbares Benchmarking.
Für Lehre und Forschung zählt vor allem Wiederholbarkeit: Nur wenn identische Testläufe mit vergleichbaren Ergebnissen möglich sind, lassen sich Verbesserungen eindeutig messen. Der G1 EDU eignet sich deshalb für Experimente rund um Stabilität, Störungsrobustheit und adaptives Verhalten – etwa beim Wechseln der Geschwindigkeit, beim Starten und Stoppen oder bei Richtungswechseln. Mit bis zu 1,8 m/s und dynamischen Bewegungsoptionen können Sie außerdem realistische Szenarien abbilden, ohne ausschließlich auf Simulation angewiesen zu sein.
Wahrnehmung und Sensorfusion: 3D-LiDAR, Depth-Kamera und IMU für reale Umgebungen
Moderne KI-Robotik steht und fällt mit Perception. Der Unitree G1 EDU kombiniert 3D-LiDAR, eine Depth-Kamera und IMU-Sensorik, um Umgebung und Eigenbewegung in Echtzeit zu erfassen. Das ist besonders relevant für autonome Navigation, Hindernisvermeidung, Mapping und robuste Lokalisierung. In Lern- und Forschungsprojekten lassen sich damit typische Pipeline-Themen praxisnah behandeln: Sensorfusion, Zustandsabschätzung, Objekterkennung, Distanzmessung sowie die Stabilität von Modellen unter veränderten Licht- und Umgebungsbedingungen.
In dynamischen Forschungsumgebungen entstehen häufig die wirklich interessanten Probleme: bewegte Personen, variable Objekte, teilverdeckte Strukturen oder wechselnde Szenen. Genau hier ist ein humanoider Roboter mit verlässlicher Umgebungserkennung wertvoll, weil sich die Lücke zwischen „funktioniert im Labor“ und „funktioniert im Alltag“ früh sichtbar machen lässt. Das erhöht die Qualität von Datensätzen, verbessert die Aussagekraft von Experimenten und beschleunigt iterative Optimierung.
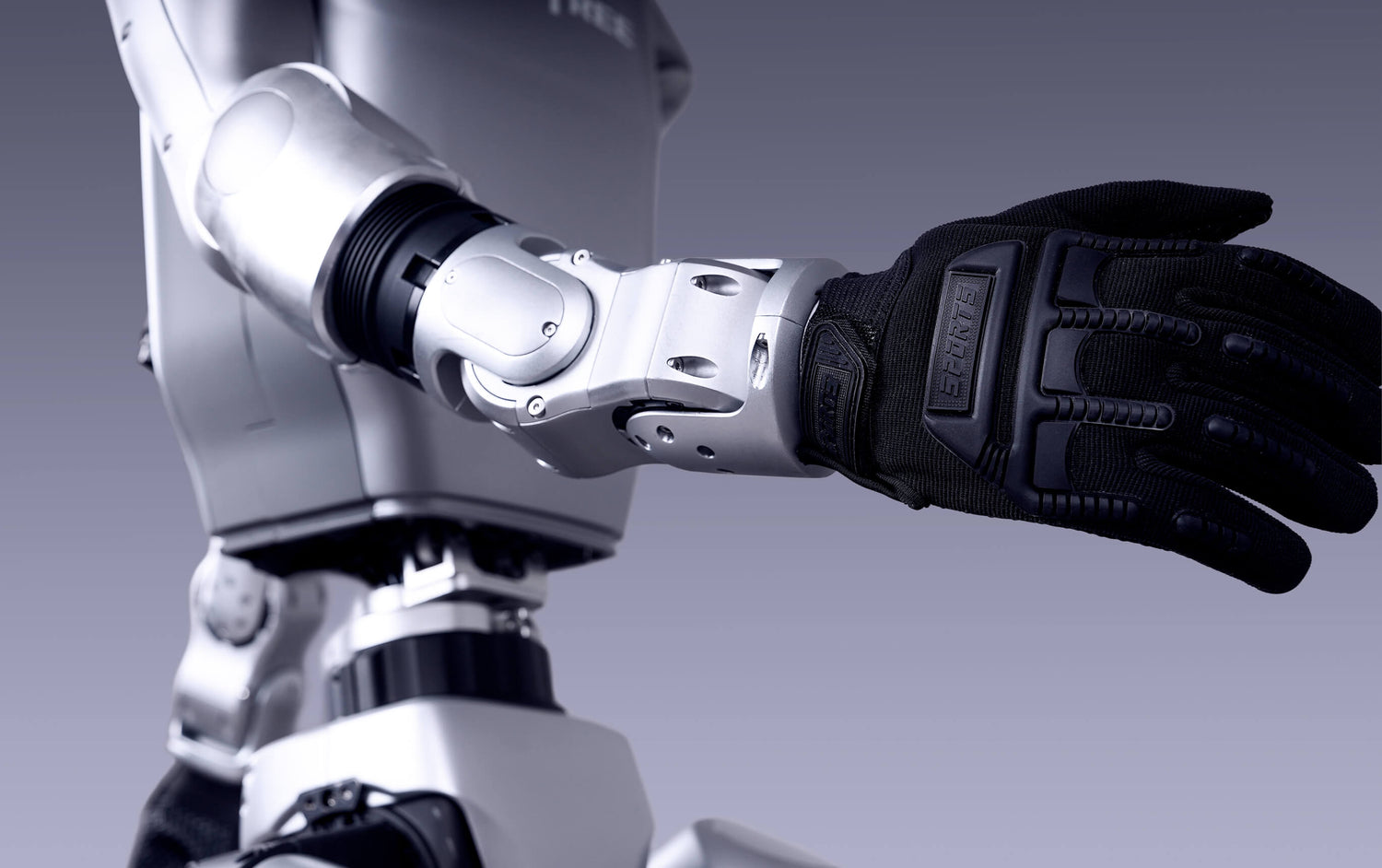
Manipulation und Greifen: 3-Finger-Hände mit Kraft-Position-Ansatz
Viele Projekte entwickeln sich von Navigation hin zu Mobile Manipulation. Der Unitree G1 EDU verfügt über zwei 3-Finger-Kraft-Position-Hände, die Greif- und Handhabungsszenarien deutlich realistischer machen als einfache Greifer. Damit lassen sich Aufgaben wie Aufnehmen, Ablegen, Umgreifen und Positionieren unter realen Kontaktbedingungen untersuchen. Für Forschung und Lehre ist das relevant, weil Greifen selten perfekt ist: Objekte variieren, Reibung ist unterschiedlich, und kleine Abweichungen müssen durch Regelung, Wahrnehmung und Planung kompensiert werden.
So kann der G1 EDU als humanoide Plattform für Greifplanung, visuelles Servoing, Kontaktmodelle oder „contact-rich“ Manipulation dienen. Auch für praxisnahe Ausbildungsinhalte ist das ein Vorteil: Studierende lernen nicht nur das Prinzip, sondern sehen direkt, wie Kraft, Position, Timing und Körperhaltung zusammenhängen.
Offene Entwicklungsplattform: ROS-Integration, SDK und KI-Erweiterung
Der zentrale EDU-Mehrwert liegt in der Entwicklungsfähigkeit. Der Unitree G1 EDU ist als offene Plattform für Forschung und Ausbildung positioniert und unterstützt ROS-Integration sowie SDK-basierte Entwicklung. Dadurch lässt sich der Roboter in bestehende Robotik-Workflows einbinden: von Datenaufnahme und Logging über Komponenten-Architektur bis zu Tests im Sim-to-Real-Setup. Für Lehrprojekte bedeutet das: Gruppen können unterschiedliche Schwerpunkte bearbeiten (z. B. Wahrnehmung, Navigation, Manipulation), ohne dass das System zu einer Sackgasse wird.
Mit der Onboard 8-Core-CPU und der Option auf KI-Erweiterung (z. B. Jetson Orin NX) lassen sich zudem moderne KI-Anforderungen besser abbilden: lokale Inferenz, Edge-Compute-Szenarien oder latenzkritische Regelung. Damit passt der G1 EDU auch zu Suchintentionen wie „ROS humanoider Roboter“, „KI Robotik Plattform“, „Embodied AI Roboter“ oder „Robotik Entwicklungsplattform Universität“.
Betrieb im Lehr- und Forschungsalltag: Laufzeit, Schutz und Einsatzfenster
Im Alltag zählen Planbarkeit und Verfügbarkeit. Mit 2,5 bis 3,5 Stunden Laufzeit (je nach Last) und rund 1,5 Stunden Ladezeit lässt sich der Unitree G1 EDU gut in typische Labortage, Seminare und Blockveranstaltungen integrieren. Die IP54-Schutzklasse (Standard) unterstützt den Einsatz in praxisnahen Umgebungen wie Werkstätten, Hallen oder Testflächen, während der Temperaturbereich von −10 °C bis +45 °C zusätzliche Spielräume für kontrollierte Außentests oder variierende Klimabedingungen bietet. Das sind wichtige Kriterien für alle, die humanoide Robotik nicht nur kurzfristig testen, sondern nachhaltig in Ausbildung oder Forschung verankern möchten.