Die Unitree H-Serie steht für eine leistungsstarke Klasse humanoider Roboter, die nicht nur menschenähnliche Bewegung demonstrieren, sondern als robuste Plattform für KI-gestützte Robotik, autonome Navigation und praxisnahe Prototypen ausgelegt ist. Besonders in Forschungslaboren, Hochschulen und industriellen Entwicklungsumgebungen werden humanoide Roboter dann interessant, wenn reale Umgebungen getestet werden sollen: wechselnde Untergründe, enge Passagen, unvorhersehbare Hindernisse und dynamische Interaktionen mit Menschen oder Objekten.
Mit den Varianten Unitree H1 und Unitree H1-2 bietet die H-Serie eine skalierbare Basis – vom leistungsstarken Einstieg in die humanoide Industrierobotik bis zur erweiterten Entwicklungsplattform für anspruchsvolle Wahrnehmung, Manipulation und datenintensive KI-Workloads. Dadurch passt die H-Serie zu Suchintentionen wie humanoider Roboter Industrie, humanoide Robotik Forschung, KI-Robotik Plattform, bipedaler Roboter, Unitree H1 kaufen oder humanoider Roboter für Universität.
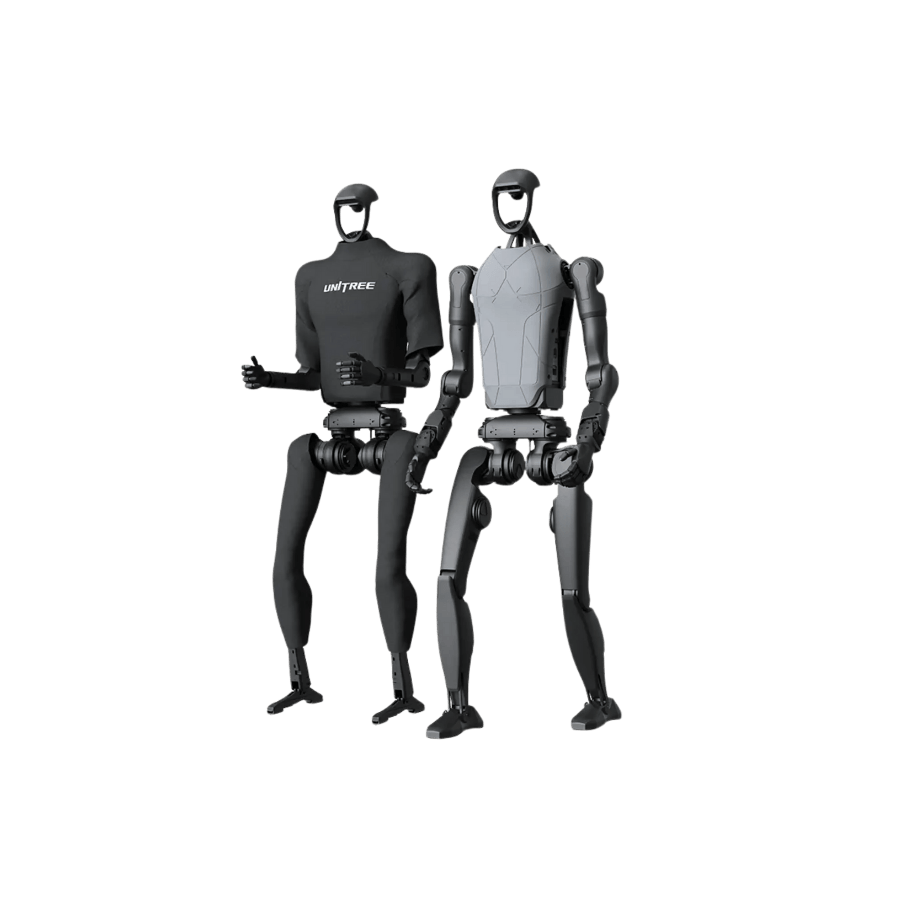
H-Serie Varianten: Unitree H1 und Unitree H1-2 im direkten Profil
Die H-Serie ist in zwei Hauptversionen verfügbar, die sich vor allem in Sensorik, Rechenleistung, Manipulationsfähigkeit und Systemgewicht unterscheiden. Für SEO und Nutzerführung ist das wichtig, weil viele Besucher gezielt nach „H1 vs. H1-2“ suchen, um den passenden humanoiden Roboter für ihr Projekt zu wählen.
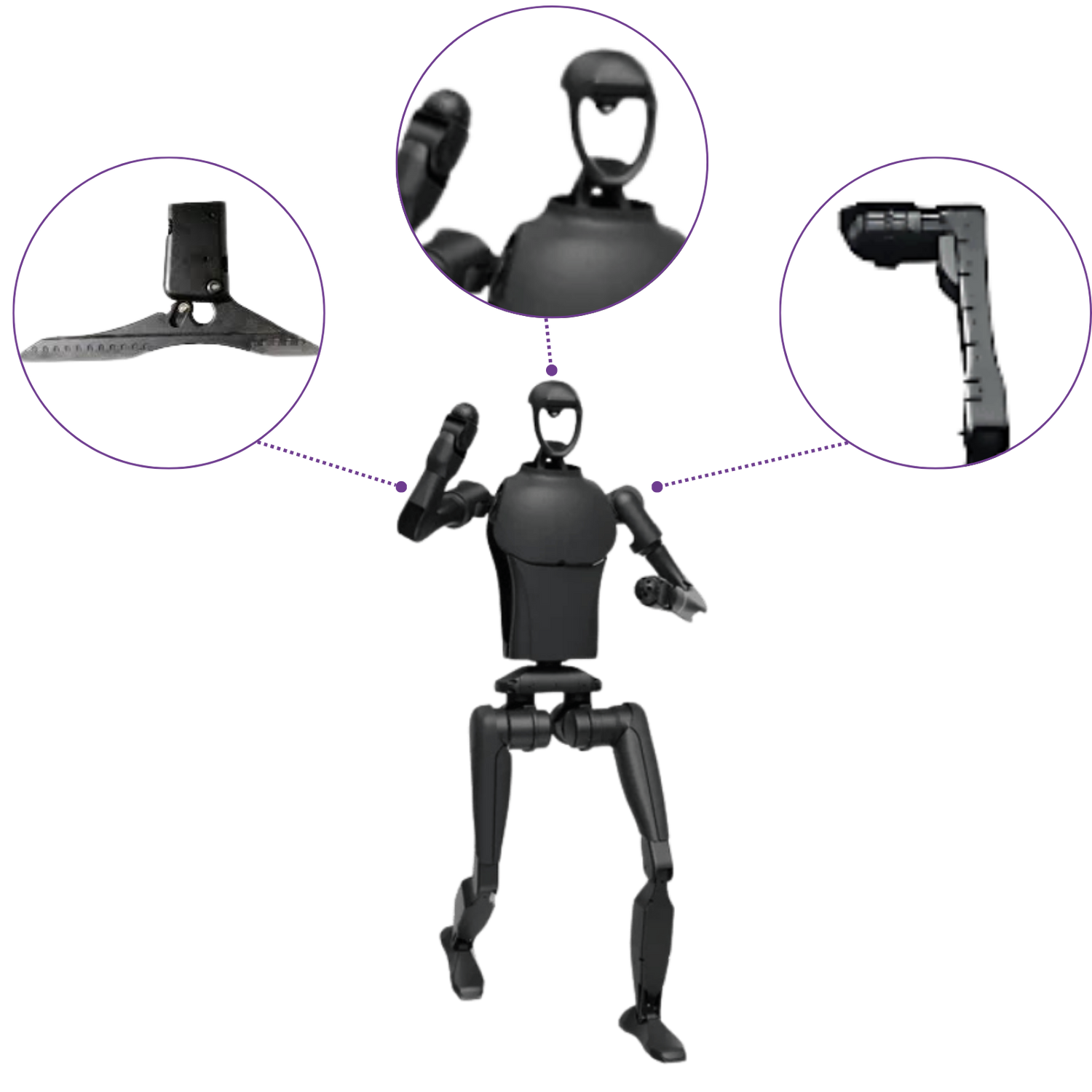
Unitree H1: leistungsstarke Standardplattform mit Fokus auf Mobilität
Der Unitree H1 ist auf dynamische Lokomotion, stabile Balance und zuverlässige Umgebungswahrnehmung ausgelegt. Er eignet sich besonders für Robotiktests, Bewegungsforschung, autonome Navigation und erste industrielle Prototypen, bei denen reproduzierbare Lauf- und Interaktionsszenarien im Vordergrund stehen.
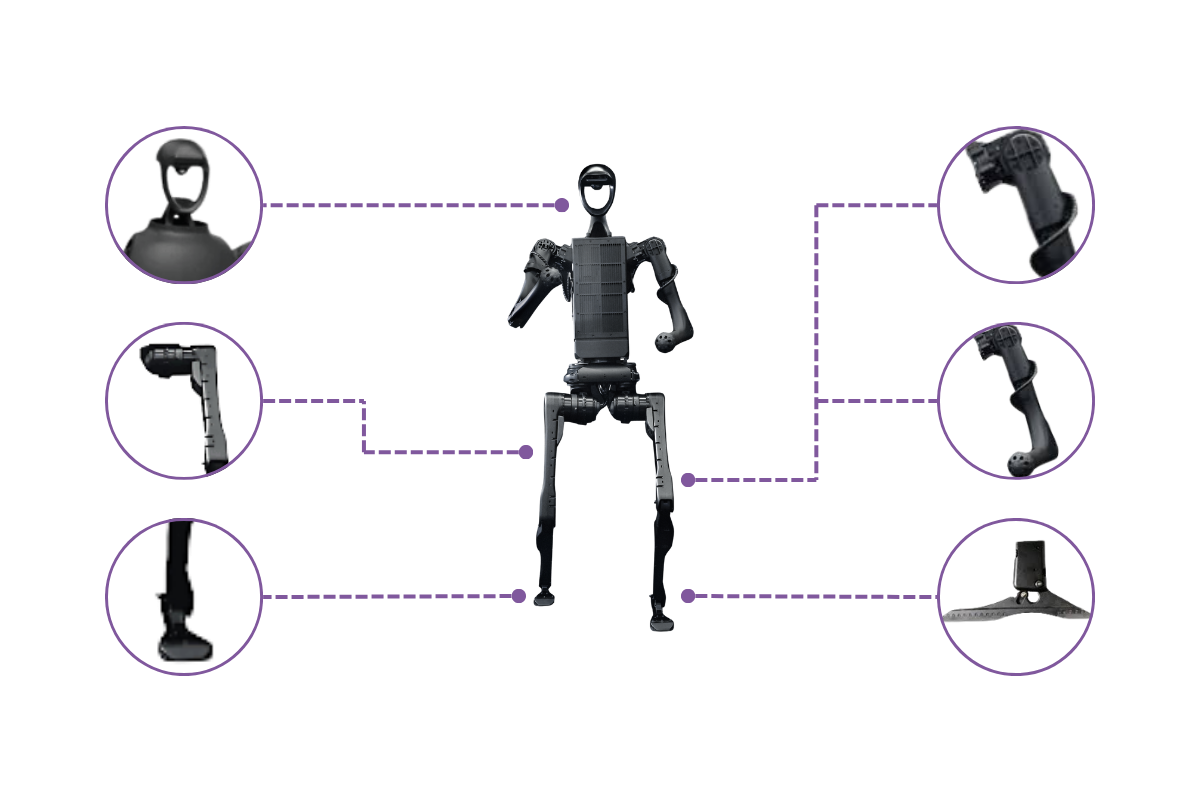
Unitree H1-2: erweiterte Plattform für 360°-Erfassung, Manipulation und KI-Workloads
Der Unitree H1-2 erweitert das Setup in Richtung „Entwicklungs- und Forschungsplattform“: stärkere Umgebungserfassung, zusätzliche Sensormodule und mehr Freiheitsgrade für realistischere Bewegungen und feinere Manipulation. Damit wird der H1-2 interessant für Hochschulen, Entwicklerteams und Labs, die autonome Robotik, Sensorfusion, Mensch-Roboter-Interaktion oder KI-Experimente mit höherer Rechenanforderung umsetzen möchten.
Technische Spezifikationen: Eckdaten, die für Projektplanung und Vergleichbarkeit zählen
Für Forschung und Industrie ist Planbarkeit entscheidend. Die Unitree H-Serie liefert klare technische Eckdaten, die typischen Suchbegriffen wie „Unitree H1 Spezifikationen“, „humanoider Roboter 23 DOF“, „Jetson Orin NX 100 TOPS Roboter“ oder „IP54 humanoider Roboter“ entsprechen.
Unitree H1 – typische Kernwerte
- Höhe: ca. 1700 mm
- Gewicht: ca. 47 kg
- Freiheitsgrade: 23 DOF (Arme & Beine kombiniert)
- Max. Laufgeschwindigkeit: ca. 3,3 m/s
- Max. Sprunghöhe: ca. 0,65 m
- Akku: ca. 864 Wh (Hot-Swap)
- Laufzeit: ca. 2,5–3,5 Stunden
- Ladezeit: ca. 1,5 Stunden
- Sensorik: 3D LiDAR, Tiefenkamera, IMU
- Manipulation: 4 DOF Arme mit Basisgreifern
- Schutzklasse: IP54 (Standard)
- Temperaturbereich: −10 °C bis +45 °C
Unitree H1-2 – typische Kernwerte (erweitertes Setup)
- Höhe: ähnlich H1 (ca. 1700 mm)
- Gewicht: ca. 70 kg (zusätzliche Hardware)
- Freiheitsgrade: bis zu 30+ DOF (Arme & Beine erweitert)
- Max. Laufgeschwindigkeit: ca. 2,0–2,5 m/s (Fokus Stabilität/Manipulation)
- Max. Sprunghöhe: ca. 0,4 m
- Akku: 864 Wh (Hot-Swap) mit erweiterter Leistungsreserve
- Laufzeit: ca. 2–3 Stunden
- Sensorik: 3D LiDAR, Tiefenkamera, zusätzliche Sensormodule
- Manipulation: 7 DOF Arme mit Full-Wrist-Gelenk, optionale Dex-Hände
- Rechenplattform: erweiterbar, optional mit NVIDIA Jetson Orin NX (100 TOPS)
- Schutzklasse: IP54 (Standard)
- Temperaturbereich: −10 °C bis +45 °C
Hinweis: Je nach Konfiguration können Werte variieren – für Projektangebote und spezifische Setups sollte immer das konkrete Modellprofil herangezogen werden.
Intelligente Mobilität: bipedale Fortbewegung mit KI-Unterstützung
Der Kernnutzen der H-Serie liegt in menschenähnlicher Mobilität, die in realen Testumgebungen verlässlich bleibt. Die Kombination aus Balance- und Gangantriebssystem, Sensorfusion und KI-gestützter Bewegungssteuerung ermöglicht stabile Laufabläufe auch dann, wenn der Untergrund nicht perfekt ist. Für Robotikforschung ist das entscheidend, weil Experimente nur dann aussagekräftig sind, wenn Bewegungen wiederholbar und messbar sind.
Der Unitree H1 adressiert dabei besonders Anwendungsfelder wie Gait-Optimierung, Whole-Body-Control, Störungsrobustheit und dynamische Navigation. Der H1-2 ergänzt diese Stärken, wenn Manipulation und feinere Körperkontrolle stärker im Vordergrund stehen – beispielsweise bei Greifaktionen, Interaktion mit Objekten oder bei komplexeren Bewegungsmustern, die mehr Gelenkfreiheit erfordern.
Autonome Navigation & 360°-Umgebungserfassung: Perception als Basis für robuste Autonomie
Moderne humanoide Robotik steht und fällt mit Wahrnehmung. Die H-Serie nutzt 3D LiDAR, Tiefenkamera und IMU, um Räume, Objekte und Bewegungen in Echtzeit zu erfassen. Dadurch entstehen die Grundlagen für autonome Navigation, Hindernisvermeidung und dynamische Umweltmodelle. Für viele Projekte ist genau diese Echtzeit-Perception der entscheidende Schritt, um von „Demo“ zu „funktionierender Autonomie“ zu kommen.
Beim H1-2 liegt der Fokus besonders auf erweiterter Erfassung: Mehr Sensorik und höhere Rechenleistung unterstützen datenintensive Workflows wie Sensorfusion, KI-Inferenz, semantische Karten oder adaptive Navigation. Das macht die Plattform attraktiv für Embodied AI, Reinforcement Learning (in realen Umgebungen), Sim-to-Real-Validierung und anspruchsvolle Mensch-Roboter-Interaktion.
Manipulation, Modularität und Entwicklungsfähigkeit: Plattform statt Einzellösung
Die H-Serie ist nicht nur ein humanoider Roboter, sondern eine modulare Entwicklungsbasis. Austauschbare Komponenten, konfigurierbare Arme und die Option auf verschiedene Greif- und Manipulationsmodule erleichtern es, den Roboter an konkrete Forschungs- oder Industriefragen anzupassen. Für Entwicklerteams ist das wichtig: Statt ein System zu „umgehen“, kann die Plattform aktiv erweitert werden.
Der H1 deckt grundlegende Manipulations- und Interaktionsszenarien ab. Der H1-2 geht einen Schritt weiter: 7 DOF Arme, Full-Wrist-Gelenk und optionale Dexterous Hands ermöglichen präzisere Greifaktionen, feinere Objektinteraktion und realistischere Tests in Anwendungsfeldern wie Handhabung, Mobile Manipulation oder Assistenzprozessen.
Für den Laboralltag relevant: Eine optionale Dockingstation kann automatisches Laden unterstützen. Zusätzlich ist ein leiser Betrieb (unter 60 dB) besonders vorteilhaft, wenn der humanoide Roboter in Innenräumen, Lehrumgebungen oder gemeinsam mit Teams betrieben wird.