Der Unitree Go2 EDU ist ein leistungsfähiger Roboterhund (Quadruped), der speziell für Robotikprojekte mit Entwicklungsfokus ausgelegt ist. Im Vergleich zu klassischen „Demo-Robotern“ steht beim Go2 EDU die vollständige Programmierbarkeit im Vordergrund: Bewegungslogik, Sensorik, autonome Navigation und KI-Workflows lassen sich praxisnah testen, messen und iterativ verbessern. Damit ist der Unitree Go2 EDU besonders geeignet für Universitäten, Labore, Start-ups sowie Unternehmen, die einen Roboterhund für Forschung, Bildung oder Prototyping im Bereich Mobile Autonomie einsetzen möchten.
Ein vierbeiniger Roboter ist dort im Vorteil, wo Räder schnell an Grenzen stoßen: wechselnde Untergründe, Kanten, Schotter, Wiesen, Treppenbereiche oder unübersichtliche Indoor-Flächen. Der Go2 EDU kombiniert dynamische Fortbewegung mit moderner Umgebungserfassung und offenen Schnittstellen, sodass Sie reale Datensätze erzeugen und Algorithmen unter echten Bedingungen validieren können – ein wichtiger Schritt, um Sim-to-Real-Lücken zu reduzieren und robuste Systeme aufzubauen.
Technische Spezifikationen für Planung, Forschung und Einsatzszenarien
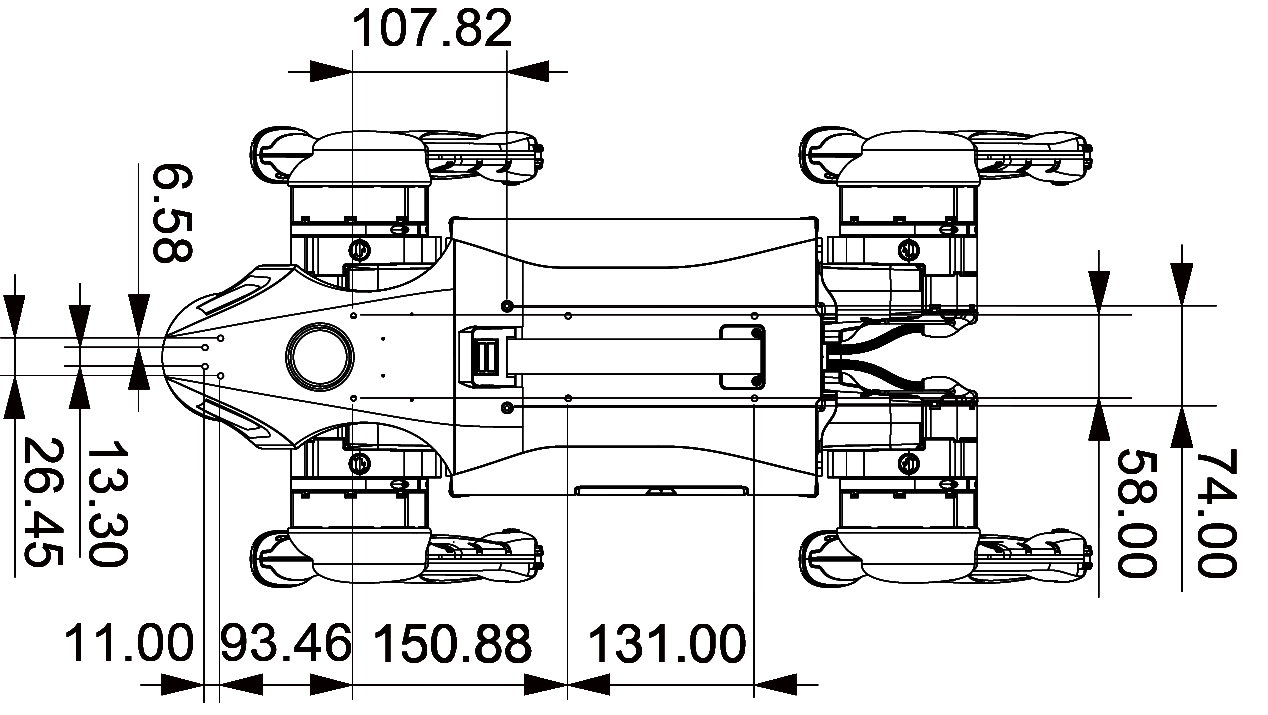
Für Robotikforschung und Ausbildung ist Planbarkeit entscheidend. Der Unitree Go2 EDU bietet kompakte Abmessungen und praxisrelevante Leistungsdaten, die sich gut in Labor- und Testumgebungen integrieren lassen:
- Abmessungen (stehend): 70 × 31 × 40 cm
- Abmessungen (hockend): 76 × 31 × 20 cm
- Gewicht (mit Akku): ca. 15 kg
- Maximale Geschwindigkeit: bis 3,7 m/s
- Nutzlast: bis 12 kg
- Akku (Standard): 8.000 mAh / optional 15.000 mAh
- Betriebszeit: 2–4 Stunden
- Spannung: 28–33,6 V
- Drehmoment pro Gelenk: bis 45 N·m
- Sensorik: 4D LiDAR L1, HD-Kamera, optional Kraftsensoren
- Konnektivität: Wi-Fi 6, Bluetooth, 4G / eSIM
- Steigfähigkeit: bis 40°
- Software/Integration: ROS, Unitree SDK, Python, C++
- Updates: OTA / cloud-basiert
- Temperaturbereich: −10 °C bis +45 °C
Diese Daten sind nicht nur informativ, sondern treffen sehr typische Suchintentionen wie „Unitree Go2 EDU Spezifikationen“, „Roboterhund 4D LiDAR“, „Quadruped 45 Nm Drehmoment“, „Roboterhund Nutzlast 12 kg“ oder „ROS Roboterhund Python C++“.
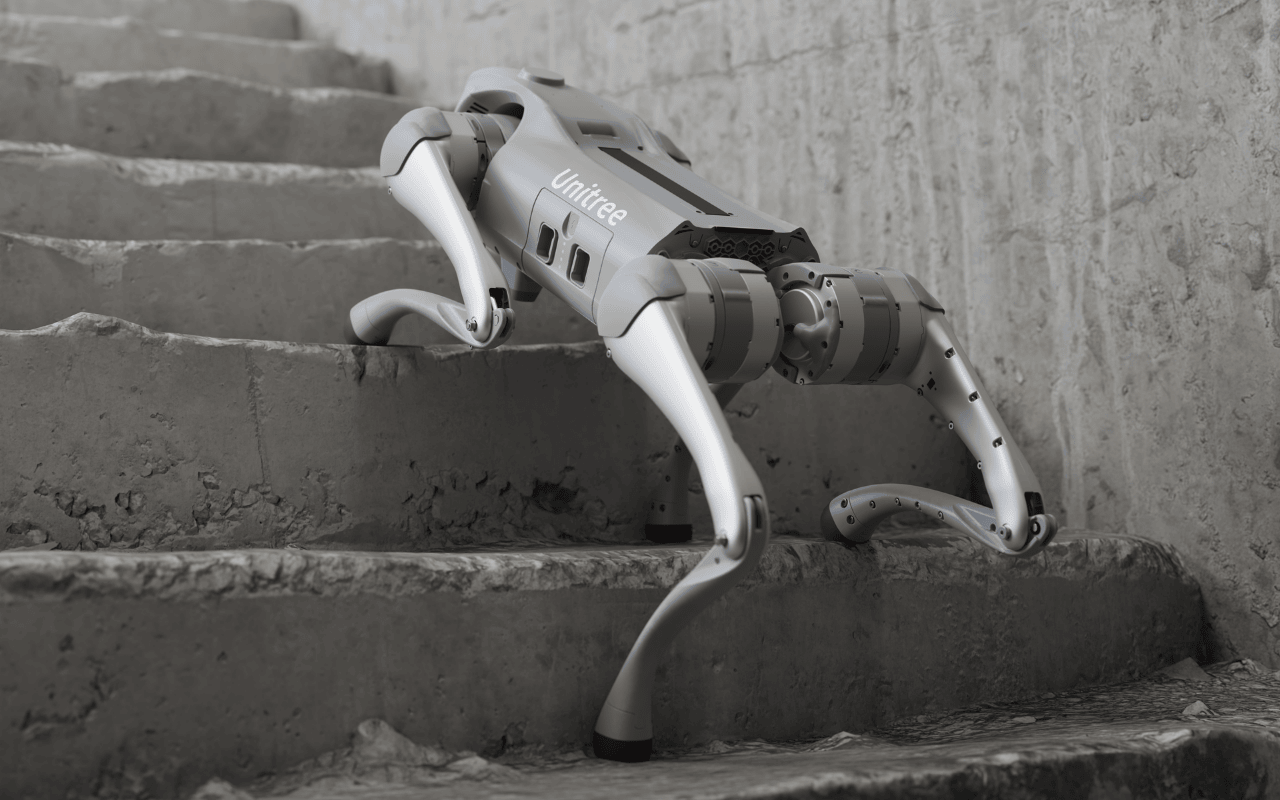
Dynamische Mobilität: Stabilität, Präzision und Gelände-Performance
Ein Roboterhund muss in Bewegung zuverlässig bleiben – nicht nur auf glattem Boden, sondern in realen Szenarien mit wechselnden Reibwerten und kleinen Hindernissen. Der Unitree Go2 EDU ist für flüssige, stabile Fortbewegung ausgelegt und unterstützt dynamische Bewegungsabläufe, die sich für Tests in Indoor- und Outdoor-Umgebungen eignen. Mit einer maximalen Geschwindigkeit bis 3,7 m/s lassen sich auch Szenarien abbilden, in denen Reaktionsfähigkeit und agile Richtungswechsel relevant sind, etwa bei Sicherheitsrouten, Inspektionsläufen oder Forschung zu robusten Gaits.
Für den Einsatz in komplexeren Umgebungen ist die Steigfähigkeit bis 40° besonders interessant. Dadurch können Versuche auf Rampen, in Testparcours oder in Industrieumgebungen realistischer gestaltet werden. Gleichzeitig bleibt das System handlich: Rund 15 kg Gewicht erleichtern Transport, Auf- und Abbau sowie den Einsatz in Lehrveranstaltungen, Praktika und Laboren.
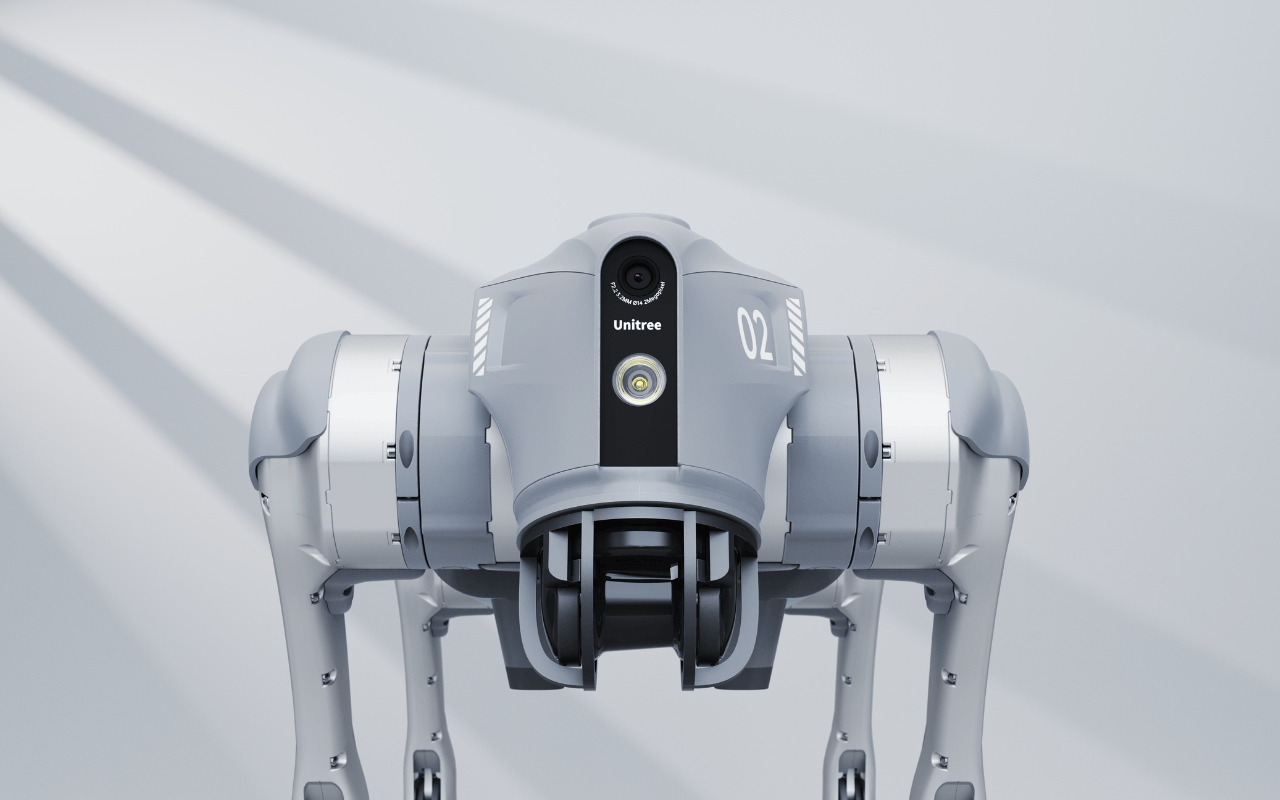
Wahrnehmung & Navigation: 4D LiDAR L1 und HD-Kamera für autonome Robotik
Moderne KI-Robotik steht und fällt mit Perception. Der Unitree Go2 EDU setzt auf 4D LiDAR L1 und eine HD-Kamera als Basis für Umgebungserfassung, Hindernisvermeidung und autonome Navigation. In der Praxis profitieren Sie davon, wenn Sie Mapping, Lokalisierung oder sensorbasierte Entscheidungslogik entwickeln: Der Roboterhund liefert die Daten, die Sie für Sensorfusion, SLAM-nahe Workflows und robuste Navigationsstrategien benötigen.
Gerade in Forschung und Entwicklung ist es entscheidend, dass Modelle nicht nur unter Idealbedingungen funktionieren. Mit LiDAR- und Kameradaten können Sie Datensätze in realen Umgebungen erzeugen und dann testen, wie stabil Ihre Algorithmen bei Veränderungen reagieren: unterschiedliche Lichtverhältnisse, bewegte Personen, neue Hindernisse oder wechselnde Untergründe. Das unterstützt organisch relevante Themen wie „Roboterhund autonome Navigation“, „LiDAR Mapping Roboter“, „Sensorfusion Robotik“ und „Robotik Datenerfassung“.
Side-Follow und Interaktion: Personen folgen, Routen begleiten, Szenarien simulieren
Ein häufiger Praxis-Use-Case im Bereich Roboterhund ist das Begleiten von Personen oder das mobile Unterstützen von Teams – beispielsweise bei Demos, in großen Hallen oder bei Testläufen. Beim Unitree Go2 EDU wird ein Side-Follow-System 2.0 beschrieben, das Personenbewegungen erkennt und dem Ziel präzise folgen kann. Damit lassen sich Follow-Me-Szenarien, Assistenzrouten und Interaktions-Experimente aufbauen, ohne dass jede Bewegung manuell gesteuert werden muss.
Für Entwicklerteams ist das besonders wertvoll, weil Sie darauf aufbauen können: Tracking, Sicherheitsabstände, Zonenlogik, dynamische Routenanpassung oder das Zusammenspiel aus Navigation und Interaktion. So wird aus „Roboterhund folgt Person“ eine robuste, messbare Funktion, die sich in anspruchsvollere Pilotprojekte überführen lässt.
Offene Entwicklungsplattform: ROS, Unitree SDK, Python und C++ für echte Projektarbeit
Der Kernnutzen der EDU-Version liegt in der Entwicklungsfähigkeit. Der Unitree Go2 EDU ist vollständig programmierbar und unterstützt ROS, Unitree SDK sowie Python- und C++-Integration. Dadurch lässt sich der Roboterhund in moderne Robotik-Stacks einbinden – von modularen Node-Architekturen bis zu Datenerfassung und reproduzierbaren Testreihen.
Für KI-Teams ist zusätzlich wichtig, dass sich die Plattform erweitern lässt. Beim Go2 EDU wird die Erweiterbarkeit mit Jetson-Orin-Modulen genannt, außerdem Optionen wie Dockingstation und WebRTC-Streaming. Damit können Sie je nach Projektziel Edge-Inferenz, Remote-Betrieb oder latenzarme Streaming-Setups abbilden – relevant für Suchbegriffe wie „Jetson Orin Robotik“, „ROS2 Roboterhund“, „WebRTC Roboter Streaming“ oder „KI Roboterhund Entwicklungsplattform“.
Auch das Thema Datenanalyse ist im EDU-Kontext zentral: Über API/Schnittstellen können Sensordaten, Bewegungsparameter und LiDAR-Informationen exportiert werden. Das unterstützt Forschungsprojekte, die auf Auswertung, Simulation, Training oder Benchmarking basieren – und macht den Roboterhund zu einem realen Datengenerator für Embodied AI.